
ミニ四駆の動きを3Dツール「Unity」でシミュレーション! コースアウトのタイミングまで現実とほぼ一致する再現度を実現
今回紹介するのは、ぜるさん投稿の『物理演算で現実とほぼ同じ動きのミニ四駆を作った』という動画です。
投稿者メッセージ(動画説明文より)
物理の勉強してたら投稿が遅くなっちゃいました
受験があるのでほんの少しの間インターネットから距離を置こうと思います
投稿者のぜるさんが、ミニ四駆の動きを3Dソフトでシミュレーションしました。とてもリアルな再現となっています。

使用ソフトはUnityです。物理演算エンジンが搭載されているため、質量・速度・摩擦・風といった、古典力学的な法則をシミュレーションできます。
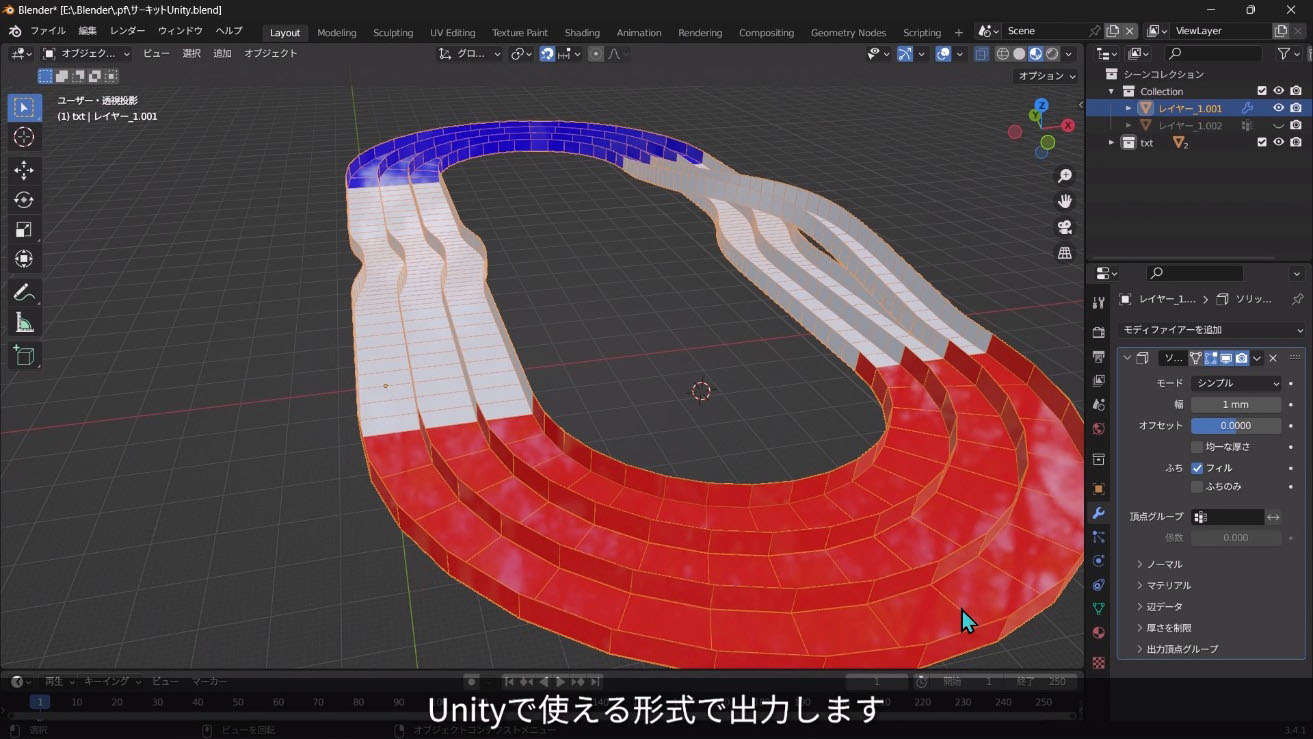
まずは、コースとミニ四駆を作ります。ミニ四駆のタイヤ、ローラーは動くようにしてあります。
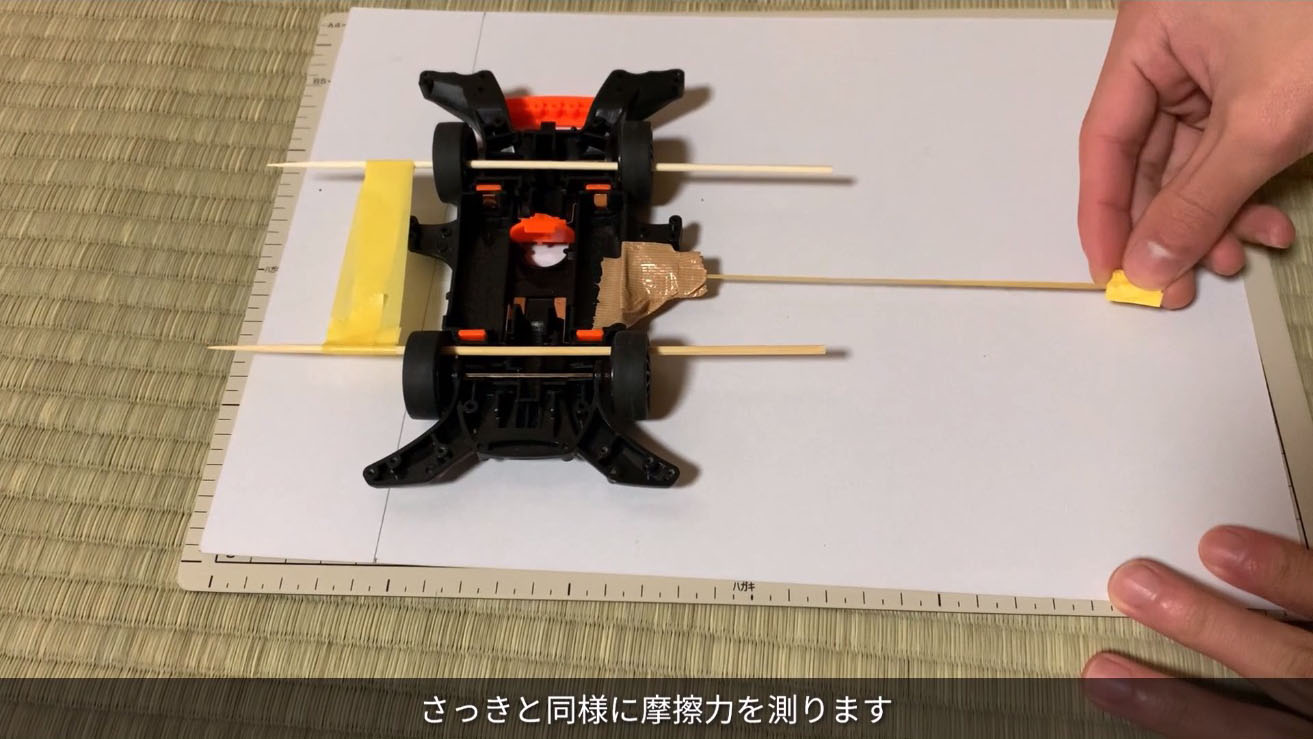
実在のマシンやコースを使って摩擦係数を測定します。実測値からはじき出された数値をソフトに設定します。
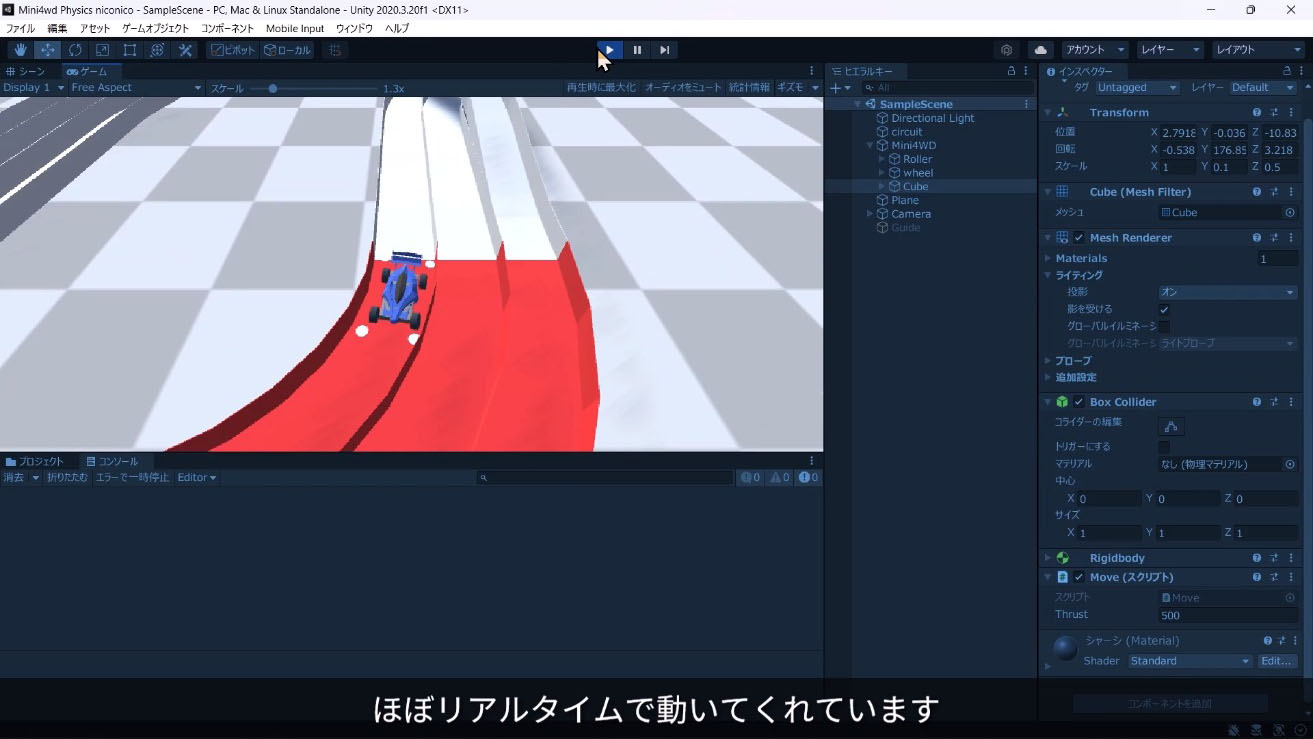
ミニ四駆が駆動するプログラムを書き、実行してみます。ほぼリアルタイムで動かすことができました。
うまく動いているので、現実と同じ条件で走らせてみることに。実在のマシンをみながらシャーシのモデルを作ります。実マシンで重心を測定し、ソフトに設定します。

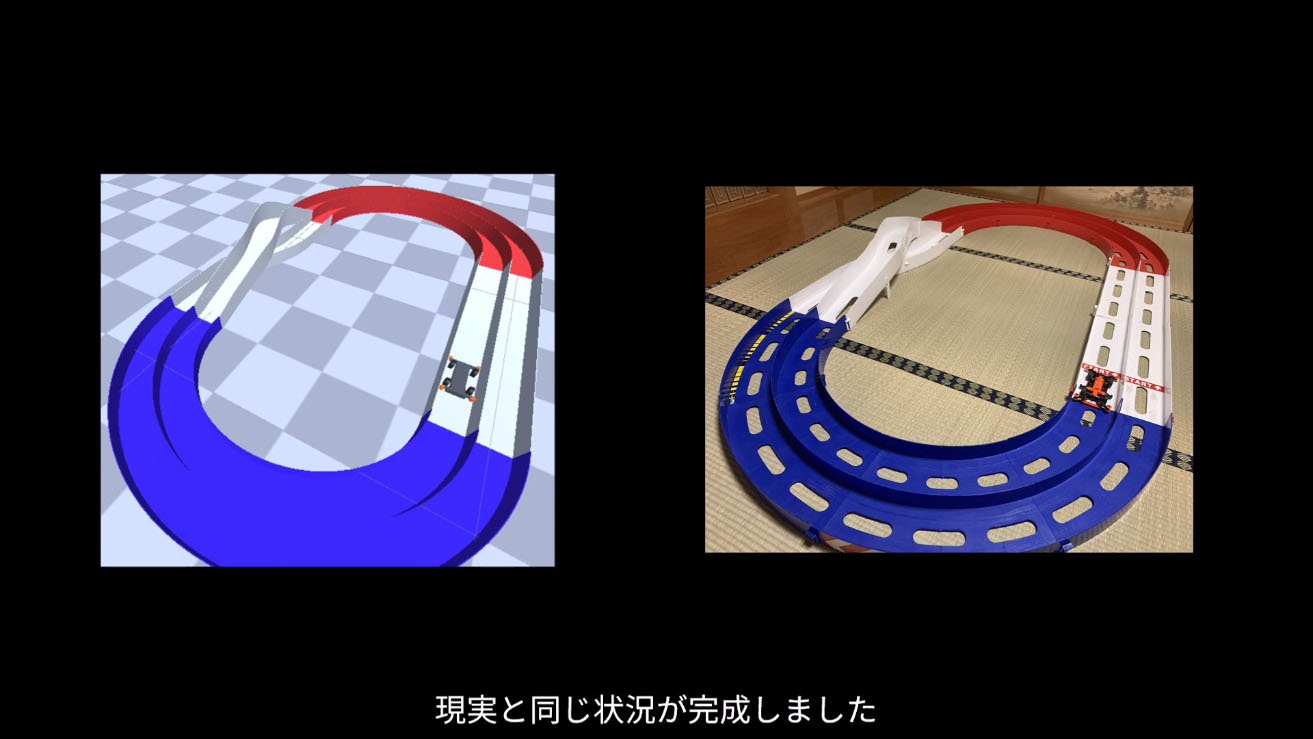
自宅にあるものと同じレイアウトのコースも作りました。
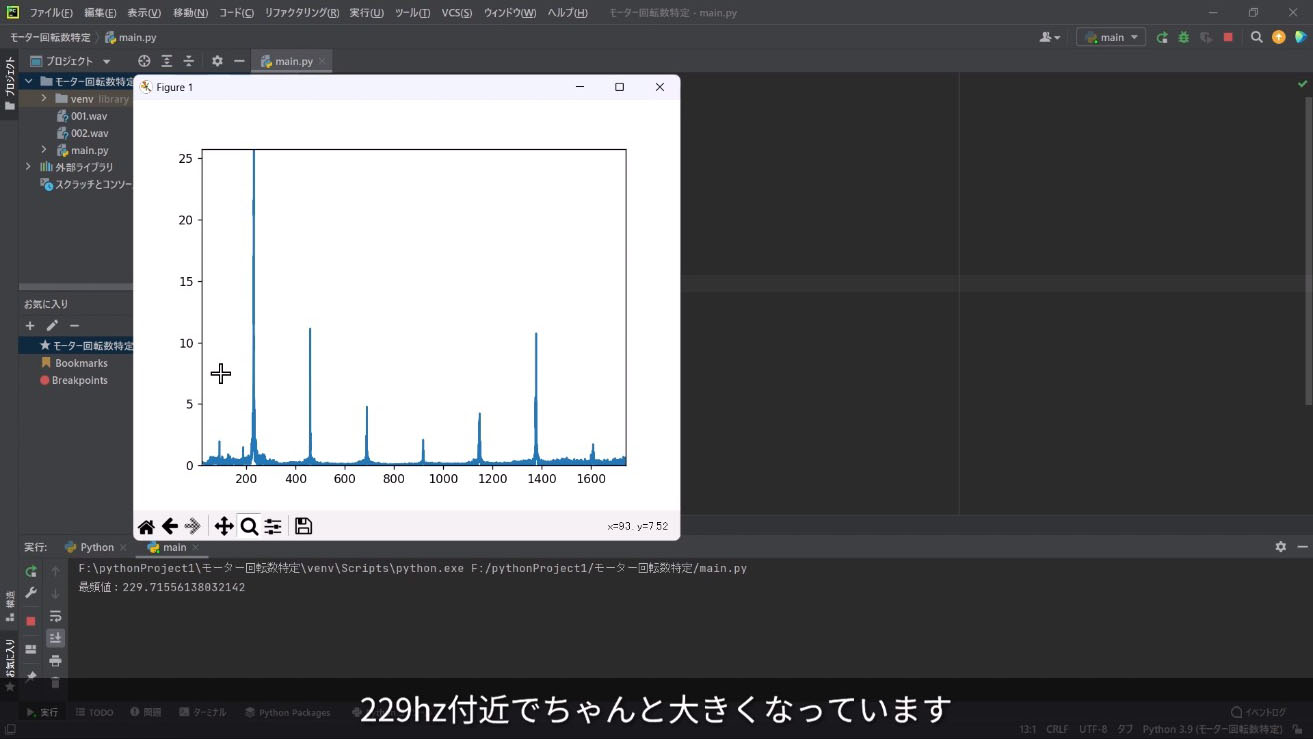
タイヤの回転数を求めます。実マシンのモーター音をスマホで録音し、フーリエ変換して周波数のグラフに。229Hz付近で大きくなっていることから、60をかけてモーターの回転数とします。ギア比も加味して計算し、ソフトに設定します。
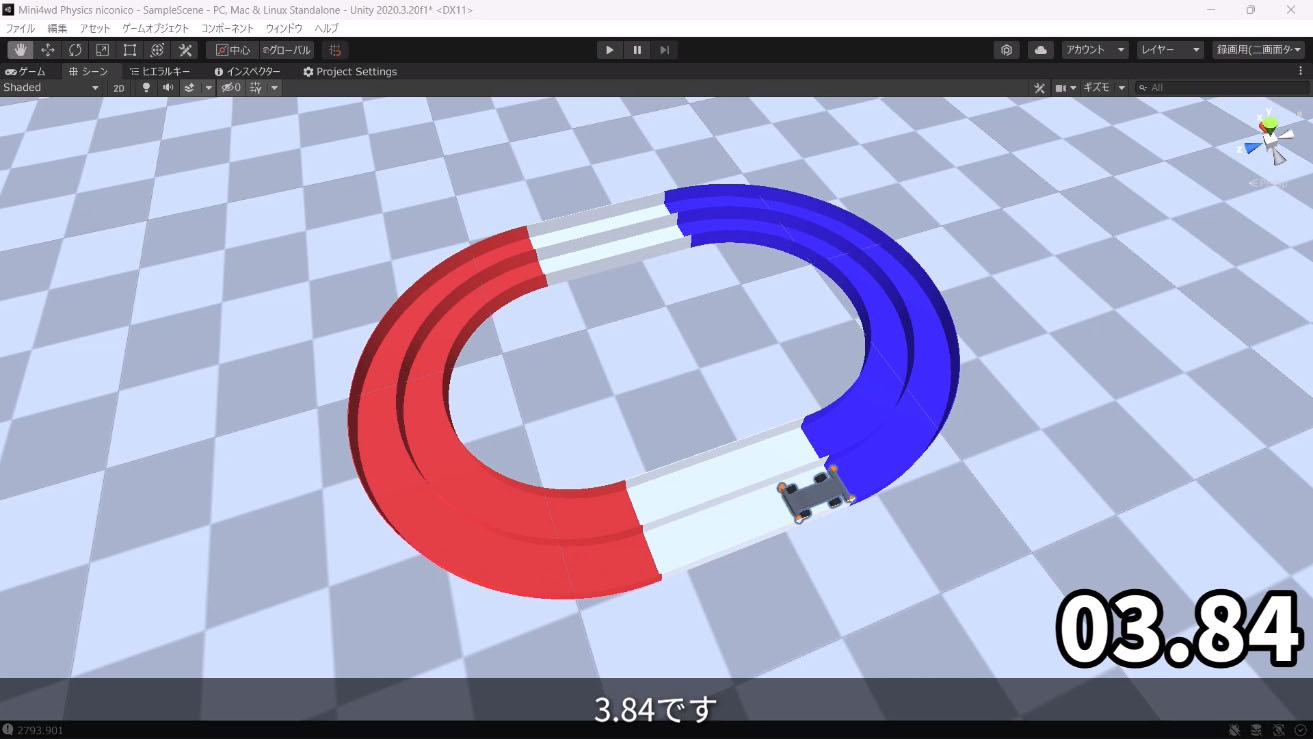
では、現実とUnityで挙動を比較してみましょう。平面コースを走らせた場合、実マシンでは3周で3.97秒でした。Unityでは3.84秒と、少々速くなりました。
次にレーンチェンジがあるコースを走らせてみます。実マシンでは2周目でコースアウトしてしまいました。Unityではどうかというと、2周目でコースアウト。この結果には「すげえ!」「マジかよ」といった声があがります。
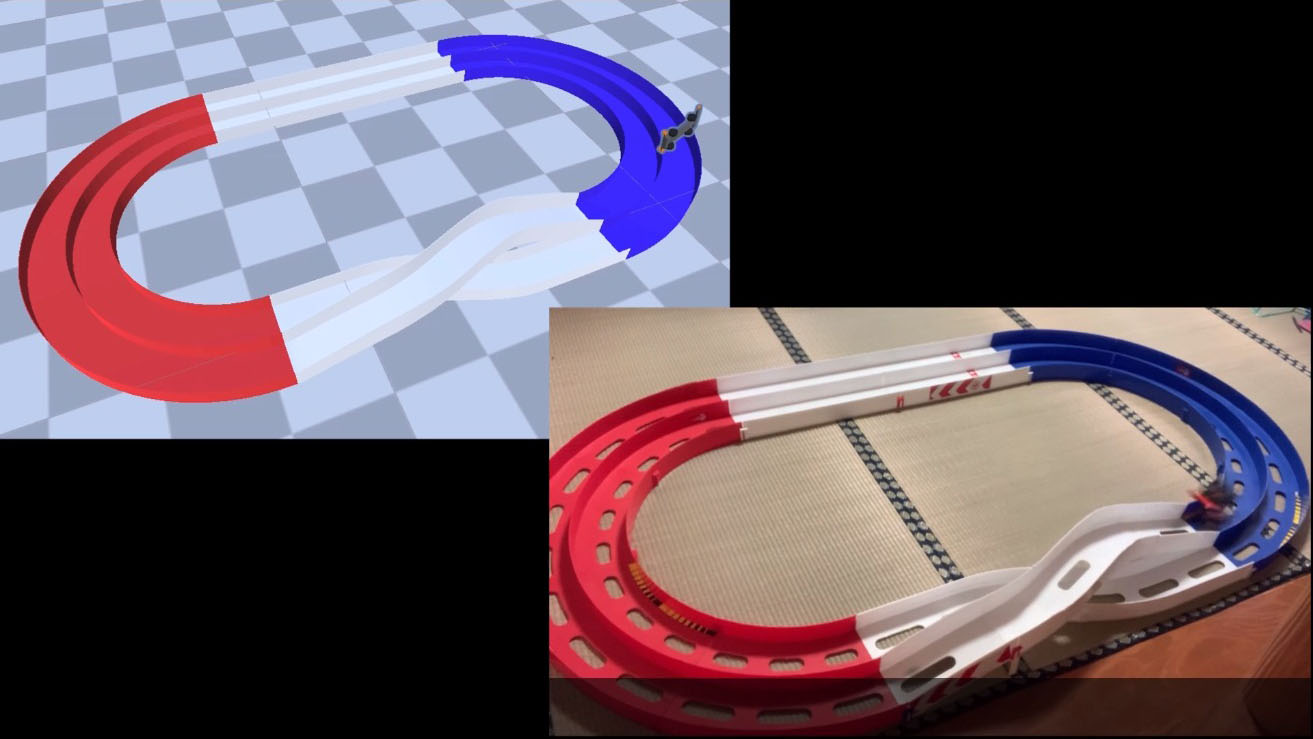
両方の走りを並べた映像をみても、かなり精度の高いシミュレーションとなっています。ぜるさんは、制作したコースの3Dモデルを「ニコニ立体」で公開しています。
視聴者コメント
マジかよ
再現性が素晴らしいね!
そろそろ強化学習で最適セッティング探索できそう
ルール無用のバーチャル部門ができる日が来るか
すごかった…
文/高橋ホイコ
▼動画はこちらから視聴できます▼
―あわせて読みたい―