
「美少女ロボが生活する世界」を目指して! とあるエンジニアが大学を8留してもまだ夢を追い続ける理由とは?【足立レイ開発者インタビュー】
■クラウドファンディングはプレッシャーの連続……
――足立レイの開発ではクラウドファンディングを利用されましたが、支援を集めるにあたって難しいと感じたところはありますか?
みさいる:
自分で勝手に作っているときは期限も、完成させなきゃいけないって義務感も全部が自分次第なんですよね。
だけど、お金を貰って返礼を約束して作っているっていうのは、やっぱり責任があるんで。そこの意識はまったく違いましたね。

それに加えて、達成できなかったら全額返金するシステムだったので、目標金額まで支援が集まるかどうかのプレッシャーもありました。
最終日近くになるまで集まらなかったんで、そこも大変でした。
――クラウドファンディングならではのプレッシャーですね。
みさいる:
それだけ「達成しなきゃいけないな」と感じていました。
でも、元来あんまり積極的な宣伝とか、広告を打つみたいな行為があんまり得意じゃなくて、そこら辺の心労もありましたね。

――苦労を乗り越えてクラウドファンディングを成功させ、足立レイを実現されましたね。なぜ成功できたと思いますか?
みさいる:
初音ミクの1号機と2号機を作りきって、動画にして人に見せていたので信頼してもらえたんだと思います。
――実績がある状態からスタートできたということですね。支援者には初音ミクのロボットを通してみさいるさんを知った人が多かったんですか?
みさいる:
そうですね。始めた当時は結構な割合がそうだったと思います。
ただ、今ではもう足立レイから知ったって人がかなり多い気がしますね。

■直立することの難しさと、見えてきた次なる課題
――そんな足立レイが今回、直立の試験に成功されたわけですが、技術的に難しいポイントっていうのはどういうところでしょうか?
みさいる:
今回の意義の1つは「剛性(変形しにくさ)」。体がふにゃふにゃだとバランスの取りようがないですから、自立できるだけの剛性があることが確かめられました。
もう1つ、足のモータに自分を支えるだけの力があるかどうかを確かめる意味もありました。

――剛性と身体を支えられるだけの力が揃わないと自立できないわけですね。等身大という大きさで二足で立つというのは、やはり難しいことなんですね。
みさいる:
立つだけでも結構、難しいことですね。
加えてもう1点確認できたことが、バランスを取るための制御をしない状態で自立できたというところです。これは重心が体の中心を通っていないとできないんです。
――全体の重量のバランスも確認できたんですね。
みさいる:
剛性、最低限の力、重心の良さの3点が確かめたかった重要な点で、自立に成功したということはすべて達成できているということです。
この3点がそのまま、技術的に難しいポイントでもありますね。
――脚で体を支えようとすると、一番細い足首のところに一番体重がかかった状態になると思うんです。足立レイの足はスッとしていて細いですが、その少ないスペースに体を支えるだけの力が出せる機械を入れるというのは、技術的に難しいところですか?
みさいる:
それはすごく難しいところですね。
人間の身体は「骨格腱構造」と言って、筋肉で腱を引っ張ってると関節が動くようになっているんです。
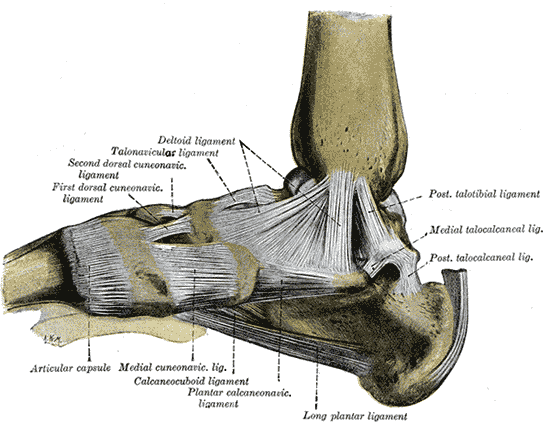
例えば、指を動かしてる筋肉は腕に入ってるわけです。同じように足首が細くても、脚の大きな筋肉に引っ張られて関節を動かしてるから、関節は細くて大丈夫なんですよね。
――関節をモータで回すロボットとは、根本的に構造が違うんですね。
みさいる:
はい。ロボットの場合は強い駆動力を発生させるためには、基本的に大きなモータが必要です。
なので、産業用のロボットだと根本ほどがっしりしてることが多いです。
だから二足歩行ロボットも、基本的に足首は太くなる傾向にあるんです。
それを細く、人間と同じようにしようとすると難しいわけです。
――単純にモータを大きくして強くしようとすると、寸胴で角ばった足になってしまうわけですね。今回、足立レイの「美少女のシルエット」を崩さないためにどういった工夫をされたんですか?
みさいる:
人間のシルエットに近づけるには大きく分けて2つの方針があると思います。
1つは骨格腱構造を再現することです。

太ももとかに駆動力を詰めて引っ張って動かすので、人間と同じような構造にできます。
最近はそういうロボットもあるんですが、部品点数が増えて高価になりがちなんです。
――部品が増えるのは、パワーを出す場所と動かす場所が離れているからですか?
みさいる:
距離の問題以上に、モータの種類が増えることが原因です。
例えば、同じモータを十何個とか使っている簡単なロボットは、足のモータも腕のモータも同じモータです。
同じモノを使うなら、パーツも共通にできるので種類を減らせます。
しかし、骨格腱構造を再現すると太ももは太もも専用、足首は足首専用、と別の大きさのモータと機構が必要になります。
様々な大きさのモータとそれぞれに合わせた部品を用意すると、共通のモータを使うのと比べて最終的なコストが何十倍にもなってしまう可能性があります。
骨格腱構造の再現では、開発期間と費用がかさむという懸念がありました。

――では、もう1つの方針で工夫されたんですね?
みさいる:
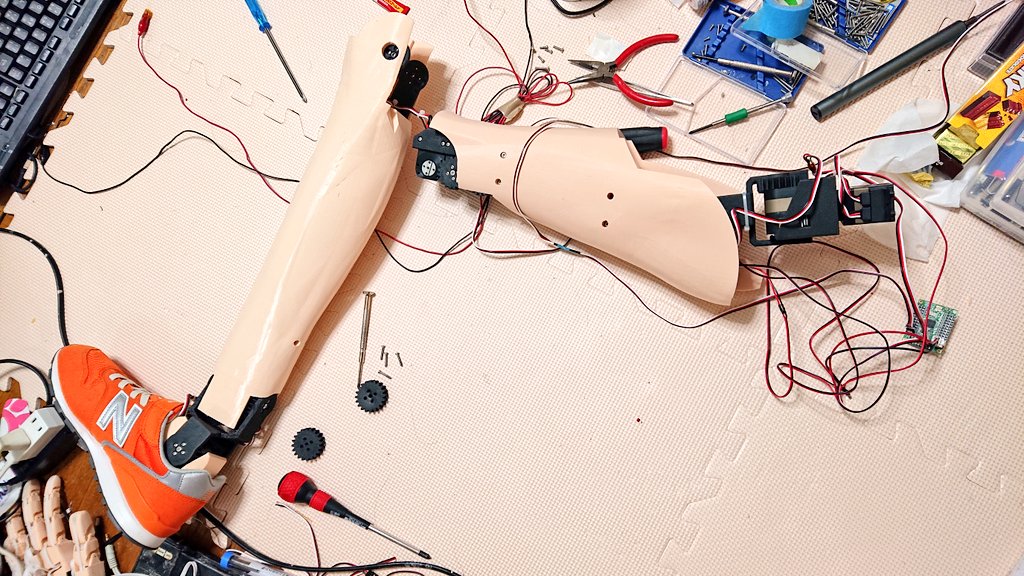
そうです。費用を抑えるため「関節にモータを入れる」方式を採用しつつ、モータを段々に積んでギアで連結して力を増すようにしました。
高さ方向にスペースを使い、関節に力を集約できるようになってるんです。

股関節は3段、膝は同じく3段で、足首は2段入っています。
――足首2、膝3、股関節3で片足で8個のモータが使われているんですか?
みさいる:
前後の動きだけでその数ですね。それに加えて、脚を横に動かしたり、傾けるためのモータも入っています。
すべて合わせると片足に14個のモータが入っています。

――モータって1個3万3千円ぐらいですよね?
みさいる:
そうです、はい。
ただ、これでも足りないです。今のパワーでは、歩行できるか微妙なところなんです。

――これだけモータを使っても、まだパワー不足なんですか?
みさいる:
ロボットを歩行をさせる前段階でやる試験がいくつかあって、まずは直立っていうのが第一段階です。
次は座った状態から立ち上がるとか、両足で屈伸するとか。さらに次に、片足で屈伸とか。

そういった動きができると二足歩行も期待できるんですが、現状では多分できない。
計算上、今の状態では片足スクワットはギリギリできるか……ちょっと難しいくらいじゃないかと思ってます。
――歩くためには、どのくらいパワーを強化しないといけないんですか?
みさいる:
欲を言えば、今の3倍くらい欲しいところではあります。
3倍あれば安泰かな。2倍ではまだ怪しいかもしれない。

■等身大美少女へのこだわり
――美少女らしいシルエットを維持しつつ、歩行を実現するパワーを出すのは難しいんですね。シルエットに関していうと、胴体もほっそりしてますよね?
みさいる:
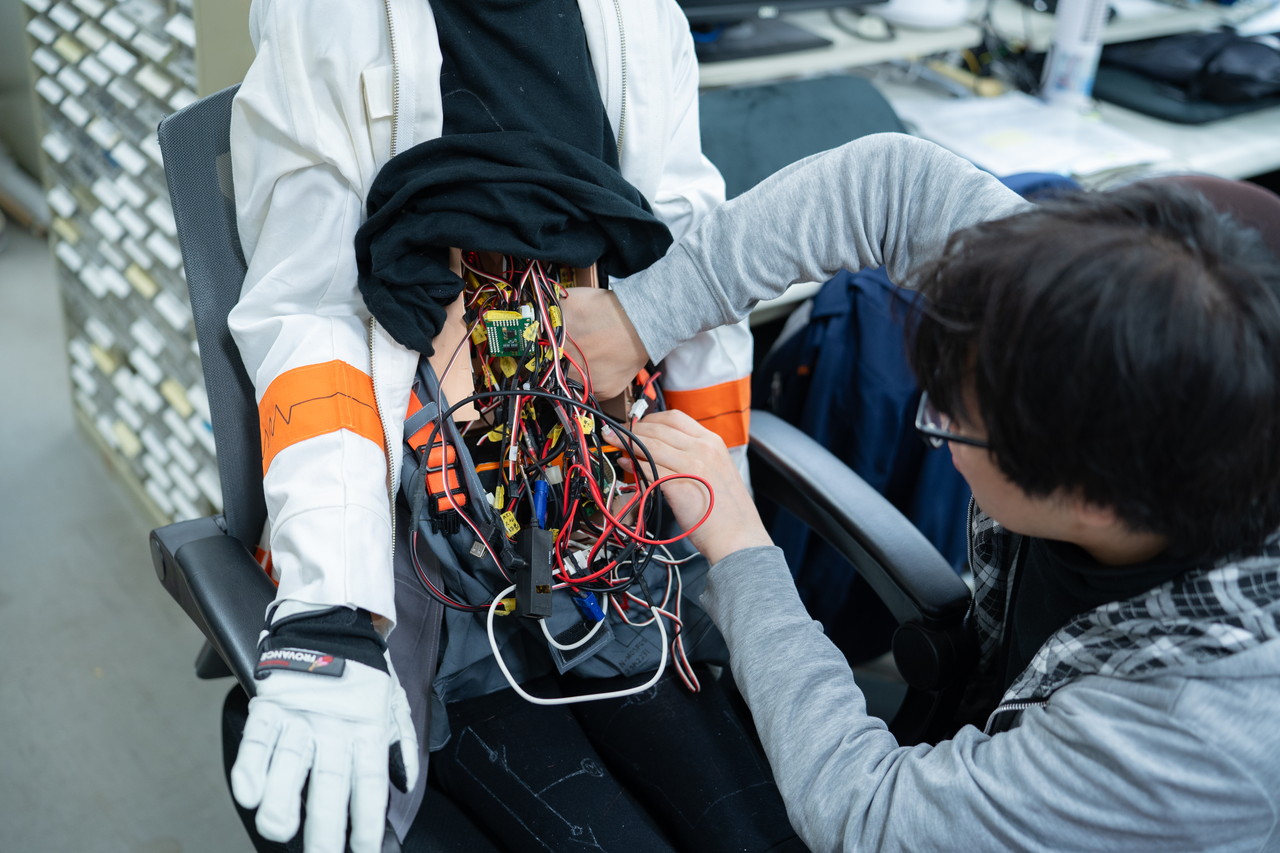
そうですね。ちょうど今おなかを開けた状態なので、見てみますか?
結構、これが癖に刺さる人がいるらしくて。
――そういう需要もあるんですね!? ちなみに、もう少し胴体が太ければ作りやすかった、とか難しいところもあったんですか?
みさいる:
そうなんです。ここも結構頑張って細くしたんですよ。
この細さで剛性を維持するために、一体成型(パーツを組み合わせるのではなくて、1つの部品で作ること)にしたんです。
この胴体を作るために60センチぐらいの大きさの印刷ができる3Dプリンターが必要で、クラウドファンディングはそれを買うためにしたようなものですね。
――人間の胴体サイズの部品を一体成型で作るなら、かなり大きなもの必要ですよね。
みさいる:
冷蔵庫の半分ぐらいの大きさの3Dプリンターがあって、100万円ぐらいするんです。

――そんなにするんですか!? ほかにも作るのが難しかったところはありますか?
みさいる:
あとは顔ですね。中に目や口を動かすプレートが入ってるんですけど、表情を作る機能って二足歩行ロボットでやることじゃないんですよ。
――確かにこういったコミュニケーションに特化したロボットは、座った状態とか体が固定されているイメージがあります。
みさいる:
なぜそうなるかというと、表情を動かすための機械が大きくなりがちだからなんです。
例えば、表情を変えるときによく使われる空気アクチュエータならコンプレッサーが必要なんです。
コンプレッサーって基本的に重くて場所を取るんです。だから二足歩行ロボットに積むには向かないんですよ。
だから、エンタメ向けに表情が変わるロボットを作るんだったら、身体は動かないように固定された形の方が合理的なんです。
――例えば、会社の受付をロボットにしたいなら、受付に固定して後ろから電気や空気を送って……それだと『ナディア』の話題で登場した「ひもつき」ですよね。
みさいる:
そうですね。受付ロボットを作ってくれという案件だったら、絶対に固定したのほうが賢い。そっちでやるべきだ、と思うんです。
でも、固定する前提で作ったものは歩き出せないんですよ。建物と同じで基礎をしっかり作って倒れないように作りますから。

僕が目指しているのは人を作ることなんです。始めから自由に動けるように一個体として作らないと、人間のように歩き回る未来はない。
僕は一個体として完成してるロボットが生物として強いだろうと思っているんで、舞台装置的なロボットは作りたくなかったんです。